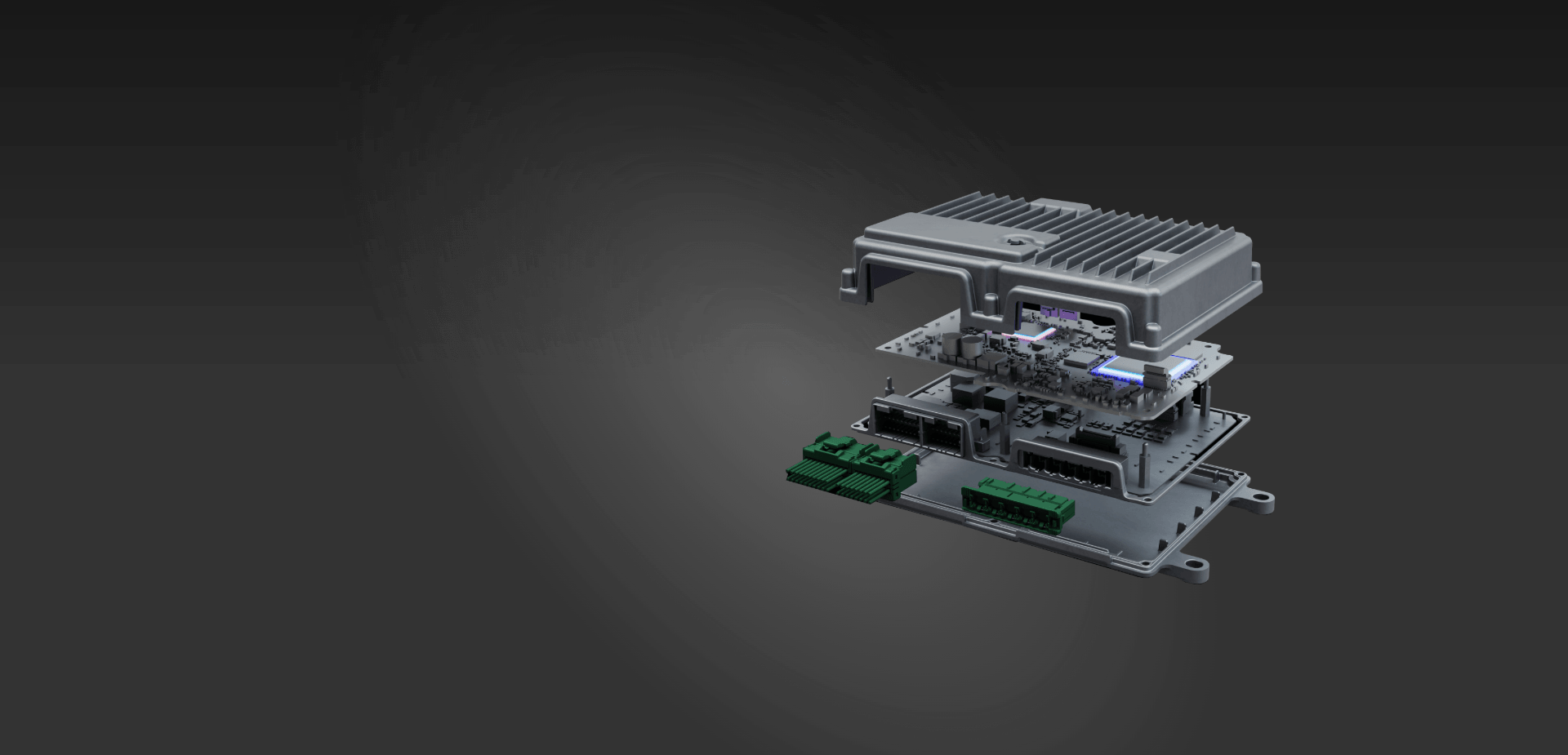
High-Precision Map Sensor (MAP-ECU)
The High-Precision Map Sensor (MAP-ECU) is equipped with a GNSS/IMU module. By fusing information from visual sensors/lidar positioning and comparing it with internal high-precision map data, it obtains accurate position information. The system performs positioning fusion based on position information obtained at different frequencies and through different calculation methods, yielding accurate self-vehicle position data and outputting high-precision map information ahead of the vehicle's path.